Imagine a bustling construction site where robots do most of the tradesmen’s dirty work, so to speak—hauling materials, climbing ladders, and navigating scaffolding. Assistant professor of architecture Michael Silver is leading the multidisciplinary Rust Belt Robotics Group at the University at Buffalo, State University of New York, to develop humanoid robots that interact with people in dynamic environments.
Though many researchers are in the race to develop construction robots, Silver, a self-taught roboticist, and his team are consulting
with contractors, tradespeople, and trade unions to ensure their robots add
value to the industry. Through these discussions, they have learned that
construction workers are concerned robots will supplant them. As a result,
Silver emphasizes that his research is in co-robotics—meaning
that the machines work alongside people and not in isolation—and
focuses on making people more productive and profitable.
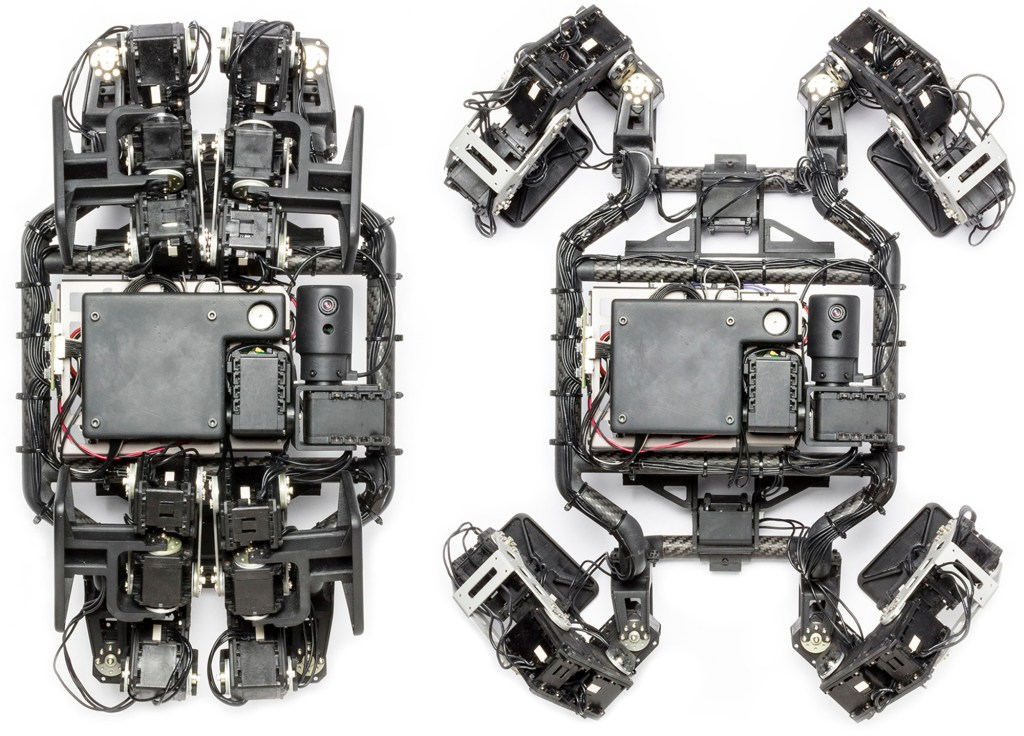
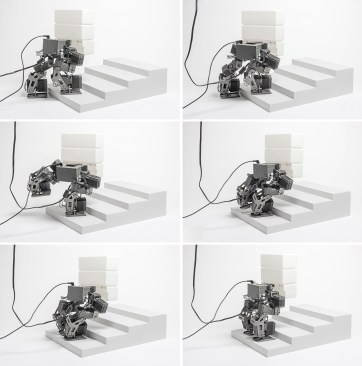
In the past two years, Rust Belt Robotics has built three generations of small-scale, but increasingly complex, android prototypes coined On-Site Construction Robots (OSCR, pronounced “Oscar”). The first OSCR lifted a lightweight, 3D printed ABS-plastic brick, took a few steps, and then set the brick down in a precise spot. The second version lifted three ABS bricks and stepped up a 1-inch-tall riser. The third OSCR walked on four legs for greater stability and strength, carried and deployed lightweight but standard-size bricks. It also navigated the group’s laboratory space and tracked other color-coded bricks using a video camera integrated into its carbon-fiber structure and software controls.
Now the team is building its fourth prototype—a
bipedal robot that can use its hands to grip and stack waterjet-cut sandstone
blocks. Enabled with Wi-Fi, this larger machine will combine the capabilities
of the previous OSCRs with the ability to 3D scan a site and communicate information—such
as field conditions and progress photographs taken by its video camera—back to the humans it is assisting.
Silver says that he could increase the intelligence and functionality of the robots by programming them to transmit BIM data to and from the jobsite to team members—human or android. “I would like to pursue new ways of integrating robotics into the cloud,” he says. Rust Belt Robotics is now leading a three-year effort in conjunction with multiple parties to refine and deploy an OSCR to an actual jobsite.
Juror Steven Rainville applauded the group for diving into such a competitive research area that shows promise in altering the future of the construction industry. “This is really cool to me,” he said.
Note: Juror Joyce Hwang, who also teaches at University at Buffalo, SUNY, recused herself from judging this entry.
Paul Qaysi
OSCR-2 carrying three blocks up a staircase.

Paul Qaysi
OSCR-3 standing on two legs.
See all the 2015 R+D Award winners here.
Project Credits
Project:
Co-Robotics and Construction: OSCR 1-4 Prototypes, Buffalo, N.Y.
Design Firm: Rust Belt Robotics Group, University at Buffalo, State University of New York (SUNY)
OSCR-1 and OSCR-2 Teams: Ball State
University—Mike Silver, Mahesh Daas, Josh
Vermillion (faculty); Yevgen Monakhov, Jason Foley, Matthew
Fullenkamp, Assoc. AIA, William Zyck, Justin Krasci, Michael Bolatto, Tyler Cox, Assoc. AIA, Glenn
Cramer, Assoc. AIA, Robert Cichocki, Antone Sgro, Derek Anger, Tianxia Peng, Derek Newman,
David Smith, Yao Xiao, Matthew Wolak, Thomas Friddle (students)
OSCR-3 Team: University
at Buffalo, SUNY Team—Mike Silver, Karthik Dantu (faculty); Colin Jacobs, Tim Ruhl, Albis Del
Barrio, David Heaton, Gary Chung, David Lin, Georine Pierre, Robert Miller, Johnny
Lynch, Daniel Fiore, Dylan Burns, Jia Jian Feng You, Marc Velocci (students)
OSCR-4 Team: University at Buffalo, SUNY Team—Mike Silver, Karthik Dantu (faculty); Colin Jacobs, Tim Ruhl, Albis Del Barrio, David Heaton, Gary Chung, David Lin, Georine Pierre, Robert Miller, Johnny Lynch, Daniel Fiore, Dylan Burns, Jia Jian Feng You, Marc Velocci, Evan Martinez, Christopher Vicente (students)


