
Mix the waste-free efficiency of additive manufacturing with the automated teamwork of swarm robotics, and you get a sense of what Fiberbots is trying to accomplish in the building industry. The latest project released from MIT’s Mediated Matter Group, founded and directed by designer Neri Oxman, aggregates 16 architectural-scale, freestanding, fiber-reinforced composite (FRC) tubes built in tandem by an army of autonomous robots.
The resulting 4.5-meter-tall (15-foot-tall) installation calls to mind other human-scale additive manufacturing efforts—such as NASA’s 3D-Printed Habitat Challenge and myriad 3D printed houses—and swarm robotics that are tackling construction efforts such as bricklaying.
The Mediated Matter Group itself is no stranger to the use of robotics. In 2013, the panelized armature of its landmark Silk Pavilion was deftly woven by a robotic arm. That frame became the structure for the webs that were output by 6,500 silkworms, which, along with termites, were Mother Nature–supplied inspirations for the “robotic chimeric silkmite” the group seeks in Fiberbots.

Courtesy the Mediated Matter Group
Unassembled Fiberbot components

Courtesy the Mediated Matter Group
Overview of a Fiberbot fabricating a tube; the tilt shows how curvature is achieved from segment to segment
For the project, published in last month’s issue of Science Robotics, lead researchers Levi Cai and Markus Kayser distinguished Fiberbots from their precedents in two primary ways. First, the team applied the rapid fabrication and rapid manufacturing methods to a non-rectilinear built environment. Second, they overcame the common limitations of 3D printing—a nonstructural medium and a size-constraining bed and gantry—by utilizing fiberglass and, moreover, by developing an autonomous construction robot—22 of them, to be exact—capable of 3D printing a form that could exceed its own size many times over.
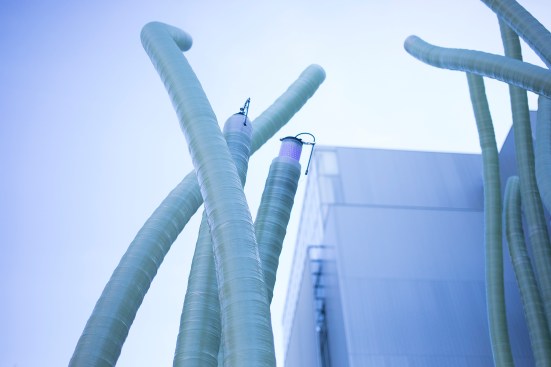
Over the course of 12 hours across two days, each of the 16 robots deployed for the site installation wended its unique curvilinear path upward, starting from a reusable footing of steel tubing and stakes. The outstretched FRC tubes have total curvatures ranging from 2.5 meters (8.2 feet) to 4.1 meters (13 feet), and overhangs of up to 1.5 meters (4.9 feet) in the horizontal axis. The robots, each assigned a preplanned trajectory and powered by electricity via a nearby building outlet, began constructing their respective self-encapsulating tunnels, as a caterpillar might craft were it not content with the boundaries of its cocoon.
Courtesy the Mediated Matter Group
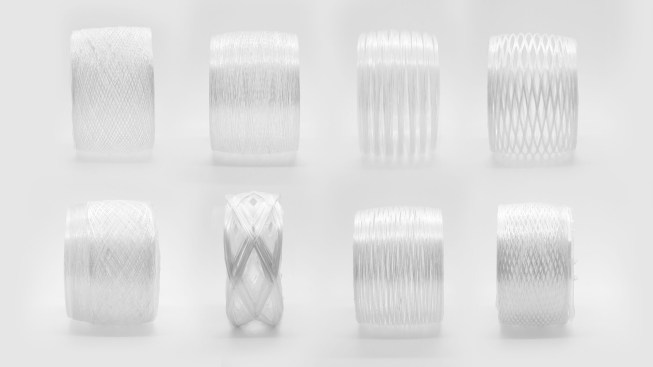
Fiber composite winding tests and samples
Along with a central body containing electronics and a driver, each Fiberbot had an inflatable silicone membrane to serve as a cylindrical mandrel. An integrated rotational winding arm would wrap a fiberglass thread, wet with photocurable resin and drawn from an on-grade storage system, starting at the mandrel’s base and then move up, like a continuous application of papier-mâché. When the Fiberbot completed a 90-millimeter-long segment, the mandrel would then deflate, detaching the robot from the tubular shell and allowing the robot to crawl up and begin wrapping the next segment. Each tube was 100 millimeters in diameter, a width determined by how much the mandrel was inflated.
All told, the team estimates each translucent tube required approximately 2 kilometers (1.2 miles) of fiberglass thread, for a total estimate of 130 kilometers (81 miles) of wrapped fiber for the entire installation. The final lengths of the tubes were up to tens of times longer than the diminutive robots themselves.
Courtesy the Mediated Matter Group
Robotic fabrication of structure in progress

Courtesy the Mediated Matter Group
Robotic fabrication of structure in progress

Courtesy the Mediated Matter Group
Fiberbots enduring a Northeast winter
After successfully enduring a seven-month tenure outdoors that included a Cambridge, Mass., autumn and winter, Fiberbots now sits in storage. The research team tells ARCHITECT it is in discussion with museums interested in acquiring the project.
Fiberbots is just the starting point for a smart and responsive construction swarm. Before the robots were released onto the site, the researchers assigned each a predetermined path, using an algorithm based on computer scientist Craig Reynolds’ distributed behavioral, or flocking, model that ensured the robots would avoid collisions with its counterparts or external objects.
By adding external sensors, lasers, or cameras to the robotics, the team writes in Science Robotics, “the Fiberbots could respond in real time to external stimuli and cues, such as obstacles or environmental variables.” If the weather or wind takes a turn for the worse in mid-construction, for example, the robots could “wind thicker and stronger composite fibers” by modifying their winding pattern and direct their tubular paths closer to each other, creating a tighter structural lattice.
And, of course, many building components are not stand-alone, single-part entities, but rather puzzle pieces that fit purposefully together, such as a column into a beam, the web and chord members of a truss, or a stack pipe into a water main. The team acknowledges the need for this next step of coordinated construction, and the complexity of crafting intersecting routes that support each other.
With talks—and research funding—increasing on the potential of Mars habitation, not to mention the need for construction in areas of extreme terrains and conditions or disaster-ravaged regions, an intelligent, responsive, and self-directed swarm of robots could become essential to building stable, responsive, and efficient structures.
The full Fiberbots project team comprises Kayser, Cai, Oxman, Christoph Bader, Sara Falcone, Nassia Inglessis, Barrak Darweesh, and João Costa.


