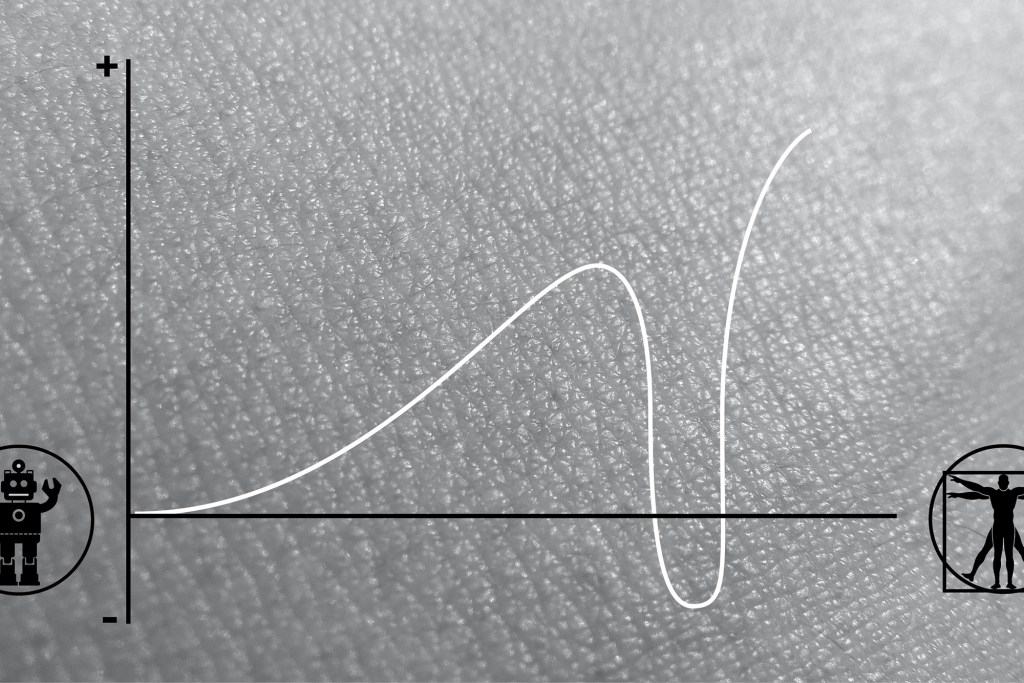
The “uncanny valley,” a measurement of an individual’s emotional response to a humanoid object, was originally coined by Japanese roboticist Masahiro Mori in 1970. In his research, Mori “hypothesized that a person’s response to a humanlike robot would abruptly shift from empathy to revulsion as it approached, but failed to attain, a lifelike appearance,” according to his 1970 essay, first translated to and published in English in IEEE Robotics & Automationin 2012. Based on this logic, a robot like Star Wars’ R2-D2 inspires empathy because it is clearly a machine; whereas the simulacrum android Repliee Q2 triggers distaste in most audiences due to its human-like, but not quite precise, appearance. Thus, R2-D2 is acceptably “above the line,” whereas Repliee Q2 descends into the uncanny valley.
Today, however, an increasing array of new material-focused technologies offer otherworldly experiences that expand our notion of the uncanny valley.
French company SkinBag, for example, manufactures an array of objects made of synthetic skin. The translucent polyurethane and rubber membranes are fabricated with wrinkles and “scarifications” resembling human or animal epidermis. Predictably, SkinBag’s apparel, vessels, and decorative objects—which are not robotic—elicit a strong response from viewers due to their freakish similarity to human skin. But for Paris-based interaction designer Marc Teyssier, “human skin is the best interface for interaction.” Teyssier and various colleagues have also developed Skin-On, an interface resembling human flesh. The composite surface is made of a “hypodermis” of viscous Ecoflex Gel, a matrix of conductive electrodes, and an “epidermis” of DragonSkin silicone that resembles skin. The interactive material functions like other tactile interfaces, such as a track pad, but unlike a typical touch-based device that “has a cold interface that doesn’t allow natural interaction or input,” Skin-On can respond sophisticated gestures that involve compression, stretching, and twisting.

Courtesy Marc Teyssier
Skin-On
Scientists from Osaka, Tohoku, and Kwansei Gakuin Universities in Japan have devised an interface based on another uncanny surface: hair. The FuSA2 Touch Display assembles thousands of plastic fiber optic strands into bundles and mounts them on a frame. According to the researchers, the “furry type of tactile sensation of this surface affords various interactions such as stroking or clawing.” A rear-mounted projector transforms the surface into a multicolor display, and an infrared camera detects user-interaction with the optical fibers via a “diffused illumination technique.” Thus, the interface approximates a soft, fuzzy touch-screen: It is a surface capable of both projection and response, but with the feel of hair.
While Skin-On and FuSA2 exist in prototype form, the Somnox Sleep Robot is already commercially available. More an interactive pillow that a robot, Somnox is designed to assist those who struggle with insomnia and other sleep disorders in getting a good night’s rest without medicinal intervention. The felt-covered, kidney bean–shaped device “breathes” in response to the holder’s diaphragm movement. Gradually, it reduces the breathing frequency to lull the user to sleep. Somnox also emits sounds like a heartbeat or white noise, and is equipped with a motion detector and Bluetooth functionality. “The Sleep Robot’s shape is designed to allow sleepers to comfortably place it on their chest, wrap their arms around it and hug it,” explains the Somnox website. “In this way, the Sleep Robot is able to give affection.”
The uncanny valley effect becomes more bizarre with biomorphic wearable technology. Such tools are designed to engage the user’s anatomy directly, enhancing the functionality of one’s appendages or skin. Arque, for example, is a robotic tail developed to provide additional balance, particularly for elderly users. Recognizing the mobility advantages that tails provide cheetahs and other animals, scientists at Keio University in Tokyo hypothesized that this bonus appendage would similarly benefit humans. The 3-foot-long prototype utilizes compressed air and four synthetic muscles to move in eight directions, although tethered cables limit travel distance. “The tail keeps balance like a pendulum,” team researcher Junichi Nabeshima told The Guardian. “When humans tilt their body one way, the tail moves in the opposite direction.”
Montreal-based fashion designer Ying Gao creates robotic clothing that conforms to the body while reacting to environmental stimuli. Her 2019 Flowing Water, Standing Time is a head-to-toe garment that responds to the chromatic spectrum of the user’s physical context. The clothing comprises diaphanous layers of silicone, glass, polyvinylidene difluoride, and electronics, and continually shifts in slow and fluid movements. “Capable of recognizing the colors in their immediate surroundings, [the garments] are at once liquid and chameleon-like, adapting to the slow rhythm of their ever-changing environment,” Gao writes in a project description. “A mirror effect is at play: the garments are reacting to what they see.”
This soft robotics trend also includes augmenting the skin itself. Scientists at the École Polytechnique Fédérale de Lausanne Reconfigurable Robotics Lab and the Laboratory for Soft Bioelectronic Interfaces have produced a synthetic skin with self-sensing properties. Made of flexible and transparent silicon and electrodes, the device is designed to cover a user’s fingertip. As a result, the skin can both sense and respond, providing haptic vibrations when desired. This compound capability makes the material a good candidate for physical rehabilitation as well as for virtual and augmented reality. According to the EPFL research team, the incorporation of both sensors and actuators is unprecedented.
In reviewing these products and wearables, we can discern a shift in the meaning of the uncanny valley. For example, Skin-On may be considered eerie because of its close visual and tactile proximity to human flesh, coupled with the fact that it is something clearly alien. However, in the case of Ying Gao’s robotic garments, the human wearer is physically transformed into something otherworldly. In both instances, aspects of human and non-human physiognomy are simultaneously present.
Perhaps the advancement of prosthetics, apparel, and other wearable tools—along with the merger of the machine and the organism—will invite an expanded definition of the uncanny valley. Or perhaps we will need a new term entirely.


