In 2005, University College London architecture professors Stephen Gage and Will Thorne published a proposal for mobile robots called “edge monkeys.” They imagined playful quadruped machines that would roam building envelopes and monitor environmental conditions, adjusting shades and windows to increase energy savings. Gage and Thorne argued that this distributed strategy would improve upon the limitations of conventional, centralized building management systems, which are expensive and generally incapable of making local adjustments. “Many management systems do not allow us to control the local world in any way at all,” the pair wrote. “The management system switches the lights on, controls the blinds, the airflow, the temperature and humidity, even the smell of the air.”
Although edge monkeys are speculative, for now, the idea for distributed autonomous controls is making its way into real-world design applications. Notably, researchers at the Princeton, N.J., laboratory of Siemens’ Corporate Technology division have developed a collection of 3D-printing robots resembling large spiders. The cybernetic arthropods are designed to operate both independently and cooperatively, working together to fabricate custom objects and assemblies. The SiSpis (short for Siemens Spiders) are similar to ETH Zurich’s flying machine–enabled construction project and MIT’s M-Blocks as a solution for the mobile, automated assembly of structures—yet their incorporation of autonomous material printing merits a closer look.
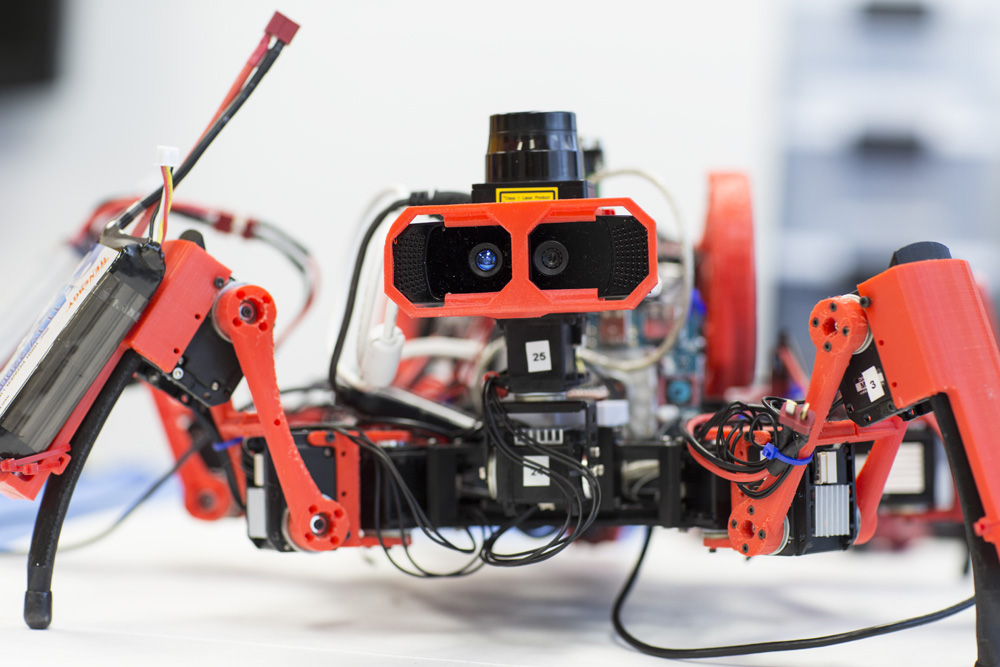
Livio Dalloro, head of the product design, modeling and simulation research group at Siemens, describes the project, which he and his team initiated in 2014, as a platform of autonomous and flexible manufacturing machines engineered for the research, development, and testing of algorithms for fabrication, perception, navigation, and collaboration. The team designed the robots to be as small as possible while equipped with the necessary technologies for movement, sensing, and fabrication, including onboard computers, actuators, a battery, a laser scanner, a depth camera, and a printing apparatus. The spiders currently extrude 1.75-milimeter-diameter PLA plastic filament, a conventional 3D printing feedstock material made from sugarcane and cornstarch and that comes in a variety of colors.

Siemens United States
Siemens Robotics Lab/Princeton, New Jersey/USA
Compared with wheeled devices, the spiders’ appendages provide a distinct advantage. “With the current structure we can make the robots walk on sloped as well as horizontal surfaces,” Dalloro explains. The current prototypes cannot yet scale a vertical wall or walk upside-down, which would substantially extend their functionality on a construction site. However, Dalloro intends to explore this capability in the future. A locomotion algorithm assists the robots in avoiding physical obstacles. Once a spider acknowledges an obstacle, such as a large object or an unstructured terrain, it can attempt a different path without the need for user intervention. Although the current models do not move quickly, speed is not a critical ability; rather, the emphasis is directed towards the robots’ precise movements in relation to global and local positioning.
Perhaps the most intriguing aspect of the SiSpis machines is the way they work together. As one example, the printing spiders do not carry any material due to their limited load-bearing capacity. Rather, each arthropod is paired with a “sidekick” robot that carries up to two spools of feedstock. Also autonomous, the wheeled sidekick follows the spider to its intended location for construction. To ensure they don’t collide with one another, each robot’s onboard computer has spatial-awareness and collision-detection capabilities, similar to those of self-driving cars.
Siemens United States
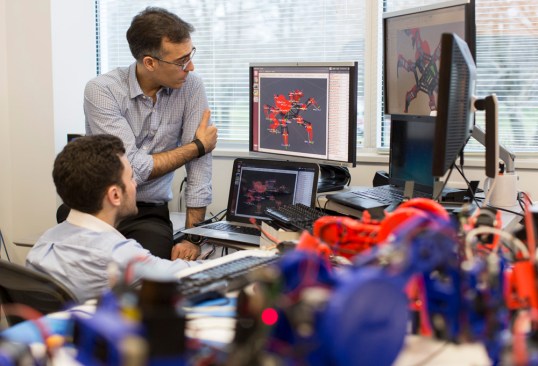
At the Siemens Robotics Lab, in Princeton, N.J.
During construction, the robots work from the same virtual set of instructions. Similar to other additive manufacturing processes, users import CAD geometry and establish fabrication parameters such as material thickness and feed rate. “This information is then passed to the swarm, which discretizes the geometry in portions and plans the print of the portions according to the spiders’ availability and location,” Dalloro says. Each spider then translates its physical section to manufacturing commands, which are similar to G-codes for standard 3D printers or CNC machines. Intelligent swapping ability makes it possible to optimize the critical path. For example, if one spider is approaching the end of its battery life, another can take over its portion of building while it leaves to recharge. So far, Dalloro and his team have conducted manufacturing tests based on primitive geometries such as boxes, cylinders, or spheres. “We are still working on showing more results in terms of a single build of complex parts with only preliminary results,” he says.
Siemens has targeted the automotive and aerospace fields for initial applications as they are already quite familiar with robotics. However, the capacities of mobility and autonomy promise to usher in an entirely new approach to construction and repair. Like edge monkeys, these capabilities have significant potential for architecture: Today, buildings are still primarily hand-assembled due to on-site challenges for robots and the centralized approach to material manufacturing and distribution. Capable spider printers would represent another form of construction labor that would be particularly advantageous in dangerous conditions, for example, or to complete complex material assemblies in situ that would otherwise be too intricate or expensive for human labor. In this way, the SiSpis platform represents a paradigmatic shift from the single-source 3D-printing approaches represented by crane-based technologies such as Contour Crafting and the WASProject. The spider printers signify a distributed model that is swarm-based, decentralized, bottom-up, and emergent—with machines collaborating and learning from one another to create future products and environments.


